
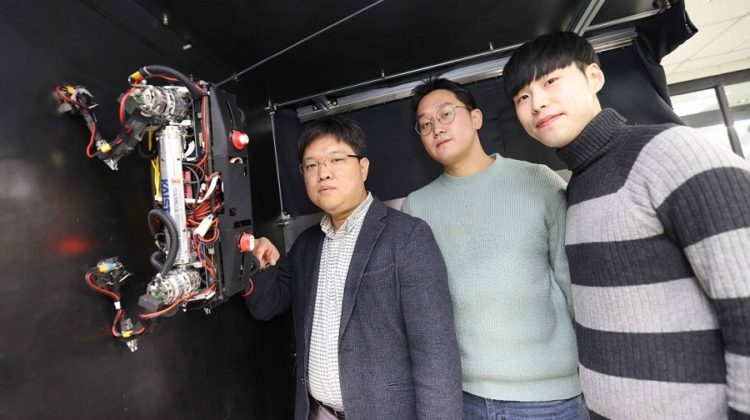
A research team at the Korea Advanced Institute of Science and Technology has developed a quadrupedal walking robot that can move at high speed on steel walls and ceilings.
The secret to the small quadrupedal robot’s extraordinary climbing ability is a set of foot pads that can quickly turn the magnetic adhesive force on and off while retaining high adhesive force even on an uneven surface. The pads contain an electro-permanent magnet (EPM), a device that can magnetise and demagnetise an electromagnet with little power. They were made using magneto-rheological elastomer (MRE), an elastic material made by mixing a magnetic response factor, such as iron powder, with an elastic material, such as rubber.
Advertisement

According to the team, the walking robots, which they dubbed MARVEL (Magnetically Adhesive Robot for Versatile and Expeditious Locomotion) could be programmed to perform inspections, repairs and maintenance tasks on large structures made of steel, such as ships, bridges, transmission towers and construction sites.
Existing wall-climbing robots use wheels or endless tracks, so their mobility is limited on surfaces with steps or irregularities. But while walking robots offer improved mobility over such surfaces, they tend to be significantly slower and often can’t perform particular movements.
Advertisement
Fast movement in a walking robot requires the sole of the foot to have strong adhesion force and the ability to control the adhesion to quickly switch from sticking to the surface or to be off of it. In addition, it’s necessary to maintain the adhesive force even on a rough or uneven surface.
The research team solved this problem by using the EPM and MRE for the first time in the design of the sole of a robot’s foot. EPMs can turn the electromagnetic force on and off with a short pulse of current. Unlike typical electromagnets, they don’t require energy to maintain the magnetic force. The research team developed a new EPM design that features a rectangular structure, enabling faster switching that requires a significantly lower voltage.
Advertisement
In addition, the research team was able to increase the sole’s frictional force without significantly reducing the magnetic force by covering the sole with an MRE. The soles weigh only 169 grams, but provide a vertical gripping force of about 535 Newtons and a frictional force of 445 Newtons, which is sufficient gripping force for a quadrupedal robot that weighs eight kilograms.
MARVEL can climb up a vertical wall at a speed of 70 centimetres per second, and was able to walk while hanging upside down from the ceiling at a maximum speed of 50 cm/s – the fastest speeds ever recorded for a walking climbing robot. In addition, the research team demonstrated that the robot can climb at a speed of up to 35 cm/s, even on surfaces that are painted or dusty and on the rusty surface of a water tank. The robot can also switch from floor to wall and from wall to ceiling, and overcome five-centimetre-high obstacles protruding from walls without difficulty.
‘By the use of the magnetic soles made up of the EPM and MRE, and the non-linear model predictive controller suitable for climbing, the robot can speedily move through a variety of ferromagnetic surfaces, including walls and ceilings, not just level ground,’ said mechanical engineering PhD student Yong Um. ‘We believe this would become a cornerstone that will expand the mobility and the places that pedal-mobile robots can venture into. These robots can be put into good use in executing dangerous and difficult tasks on steel structures in places such as shipbuilding yards.’
Advertisement
The research has been published in Science Robotics.