
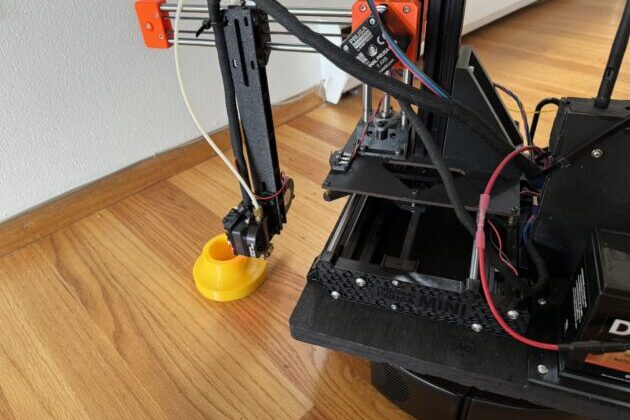
University of Washington researchers have designed a mobile 3D printer that can automatically measure a room and print objects onto its floor. The team’s graphic interface lets users design objects for a space that the robot, which they dubbed MobiPrint, has mapped out. The prototype, which the team built on a modified consumer vacuum robot, can add accessibility features, home customisations or artistic flourishes to a space.
‘Digital fabrication, like 3D printing, is pretty mature at this point,’ said Daniel Campos Zamora, a doctoral student in the Paul G Allen School of Computer Science and Engineering. ‘Now we’re asking: How can we push it further and further into the world, and lower the barriers for people to use it? How can we change the built environment and tailor spaces for peoples’ specific needs – for accessibility, for taste?’
Advertisement

The prototype system can add accessibility features, such as tactile markers for blind and low-vision people. These might provide information, such as text telling conference attendees where to go, or warn of dangers such as staircases. Or it can create a ramp to cover an uneven flooring transition. MobiPrint also allows users to create custom objects, such as small art pieces up to 7.5 centimetres tall.
Before printing an object, MobiPrint autonomously roams an indoor space and uses LiDAR to map it. The team’s design tool then converts this map into an interactive canvas. The user then can select a model from the MobiPrint library – a cat food bowl, for instance – or upload a design. Next, the user picks a location on the map to print the object, working with the design interface to scale and position the job. Finally, the robot moves to the location and prints the object directly onto the floor.
Advertisement
For printing, the current design uses a bioplastic common in 3D printing called PLA. The researchers are working to have MobiPrint remove objects it’s printed and potentially recycle the plastic. They’re also interested in exploring the possibilities of robots that print on other surfaces (such as tabletops or walls), in other environments (such as outdoors), and with other materials (such as concrete).

‘I think about kids out biking or my friends and family members who are in wheelchairs getting to the end of a sidewalk without a curb,’ said Jon E Froehlich, a professor in the Allen School. ‘It would be so great if in the future we could just send Daniel’s robot down the street and have it build a ramp, even if it was working just for a short period of time. That just shows you how reconfigurable environments can be.’