
Researchers at MIT and elsewhere have developed a computational tool that can generate the optimal design for complex fluidic devices such as a combustion engines and hydraulic pumps.
Because fluidic devices are typically very complex, they’re usually developed by experienced engineers who manually design, prototype and test each piece of apparatus through an iterative process that is expensive, time consuming and labour intensive. In contrast, with the new system, users need only to specify the locations and speeds at which they want the fluid to enter and exit the device and the computational pipeline will generate an optimal design that achieves those objectives.
Advertisement

The system could make it faster and cheaper to design fluidic devices for a wide range of applications, including microfluidic labs-on-a-chip that can diagnose disease using a few drops of blood or artificial hearts.
Recently, computational tools have been developed to simplify the manual design process, but these techniques have had limitations. Some required a designer to specify the device’s shape in advance, while others represented shapes using 3D cubes, known as voxels, that result in boxy, ineffective designs. The new computational technique overcomes these pitfalls – it doesn’t require the user to make assumptions about what a device should look like and the device’s shape automatically evolves during the optimisation with smooth, rather than blocky, inexact boundaries, which enables the system to create more complex shapes.
Advertisement
‘Now you can do all these steps seamlessly in a computational pipeline. And with our system, you could potentially create better devices because you can explore new designs that have never been investigated using manual methods. Maybe there are some shapes that haven’t been explored by experts yet,’ said Yifei Li, an electrical engineering and computer science graduate student.
The optimisation pipeline begins with a blank, three-dimensional region that has been divided into a grid of tiny cubes. Each of these 3D cubes, or voxels, can be used to form part of the shape of a fluidic device.
Advertisement
One thing that separates the new system from other optimization methods is how it represents, or ‘parameterises,’ these tiny voxels. The voxels are parameterised as so-called anisotropic materials, which respond differently depending on the direction in which force is applied to them. For example, wood is much weaker to forces that are applied perpendicular to the grain.
The new optimiser uses this anisotropic material model to parameterise voxels as entirely solid (like one would find on the outside of the device), entirely liquid (the fluid within the device), or sitting at the solid–fluid interface and thus have properties of both solid and liquid material.
‘When you are going in the solid direction, you want to model the material properties of solids, but when you are going in the fluid direction, you want to model the behaviour of fluids,’ Li explained. ‘This is what inspired us to use anisotropic materials to represent the solid–fluid interface. And it allows us to model the behaviour of this region very accurately.’
Advertisement
The computational pipeline also thinks about voxels differently. Instead of only using voxels as 3D building blocks, the system can angle the surface of each voxel and change its shape in very precise ways. Voxels can then be formed into smooth curves that enable intricate designs.
Once the system has formed a shape using voxels, it simulates how fluid flows through that design and compares it to the user-defined objectives. It then adjusts the design to better meet the objectives, repeating this pattern until it finds the optimal shape. With this design in hand, the user could use 3D printing to manufacture the device.
Advertisement
Having created the design pipeline, the researchers tested it against state-of-the-art methods known as parametric optimisation frameworks. These frameworks require designers to specify in advance what they think the device’s shape should be.
‘Once you make that assumption, all you are going to get are variations of the shape within a shape family,’ Li said. ‘But our framework doesn’t need you to make assumptions like that because we have such a high design degrees-of-freedom by representing this domain with many, tiny voxels, each of which can vary its shape.’
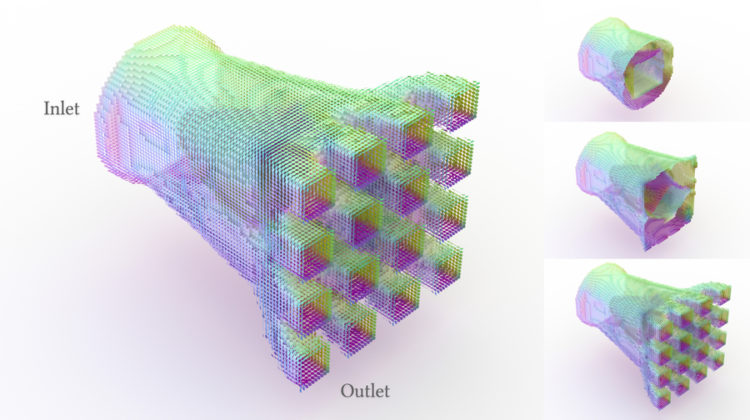
In each test, their framework outperformed the baselines by creating smooth shapes with intricate structures that would likely have been too complex for an expert to specify in advance. For example, it automatically created a tree-shaped fluidic diffuser that transports liquid from one large inlet into 16 smaller outlets while bypassing an obstacle in the middle of the device.
The pipeline also generated a propeller-shaped device to create a twisting flow of liquid. To achieve this complex shape, their system automatically optimised nearly four million variables.
‘I was really pleased to see that our pipeline was able to automatically grow a propellor-shaped device for this fluid twister,’ Li said. ‘That shape would drive a high-performing device. If you are modelling that objective with a parametric shape framework, because it cannot grow such an intricate shape, the final device would not perform as well.’
While she was impressed by the variety of shapes that the system could automatically generate, Li plans to enhance it using a more complex fluid-simulation model so that it could be used in more complex flow environments and hence more complicated applications.
A paper detailing the research can be found here.